MemoDroid נבנה כדי לפתור בעיה אמיתית: התחיל כרעיון נועז. האם יכולתי, כמפתח יחיד, לתכנן ולבנות זרוע רובוטית חכמה ומתפקדת במלואה - עם הקלטת תנועות, שליטה ב-Bluetooth, ממשק נייד וטיפול חלק ב Servos- תוך כמה שבועות בלבד?
בתור סטודנט למדעי המחשב במשרה מלאה, ששילב סמסטר עמוס עם עבודה תובענית, זה לא היה עוד פרויקט. זה היה מבחן של ריכוז, הנדסה, ונחישות.
לקחתי על עצמי את האתגר הזה כחלק מקורס IoT & Robotics בהובלת ד"ר יהודה רוזיליו, מבלי לדעת עד כמה עמוק זה ייקח אותי.
מה שבא אחר כך היה מסע הנדסי אמיתי מקצה לקצה - כל מעגל, כל שורת קוד, וכל בורג הונחו מתוך כוונה ודחיפות.
תרשים 1: הלוגו של MemoDroid
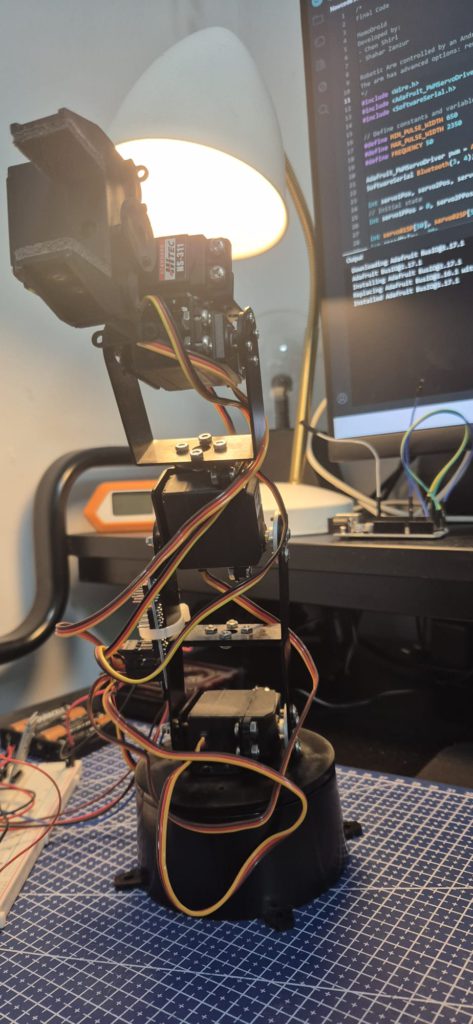
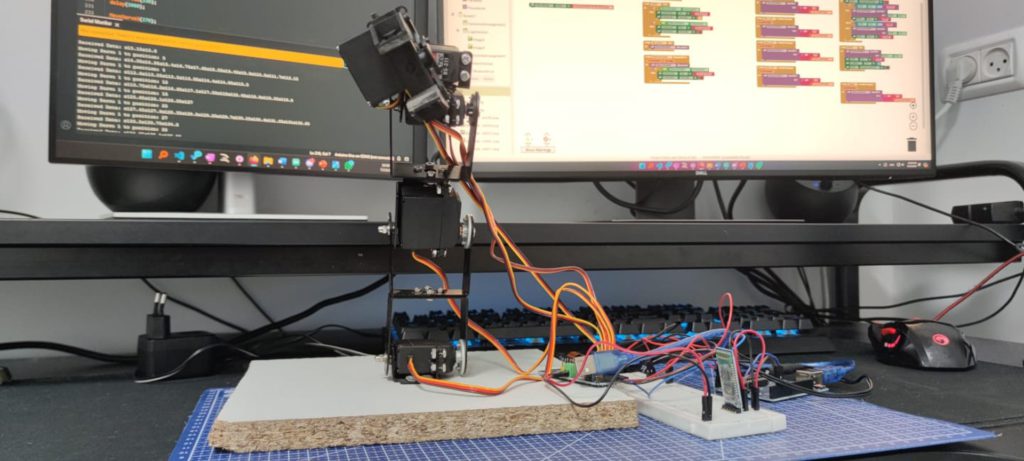
Figure 2: The completed MemoDroid robotic arm, fully built and tested.
📜 מטרה והרעיונות המרכזיים
MemoDroid נבנה כדי לפתור בעיה אמיתית: was designed to solve a real problem:
"להפוך את זה לפשוט עבור כל אדם – לעשות אוטומציה לפעולות קטנות וחוזרות בבית או בעבודה באמצעות זרוע רובוטית."
מטרות עיקריות:
שליטה מרחוק דרך אפליקציה סלולרית
יכולת להקליט ולהפעיל מחדש רצפי תנועה
מעברים חלקים וטבעיים של ה Servos
ממשק אינטואיטיבי למשתמשים ללא רקע טכני
הרחבה שעשיתי בהמשך (סיבוב °360, פרופילים מרובים, תזמון פעולות)
אבל מעבר לפונקציונליות, רציתי לעצב משהו נגיש.MemoDroid היא לא רק זרוע רובוטית - זו גישה שמטרתה להנגיש רובוטיקה לכל אחד..
🧰 תכנון וארכיטקטורה
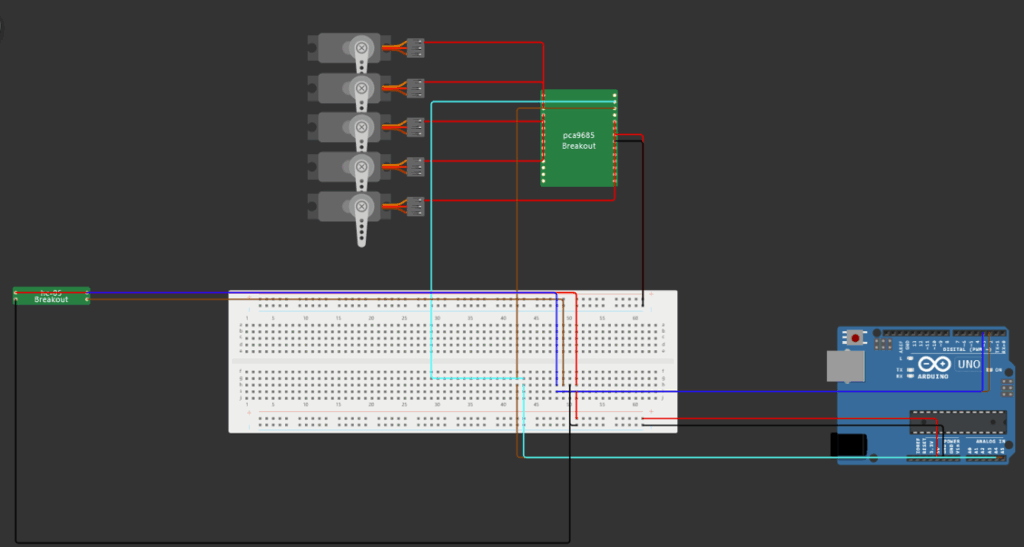
תרשים 3: שרטוט אלקטרוני ייעודי שנבנה ידנית ב-Wokwi. כולל 5 Servos, מודול Bluetooth, רכיב PCA9685 ומעגל הספק.
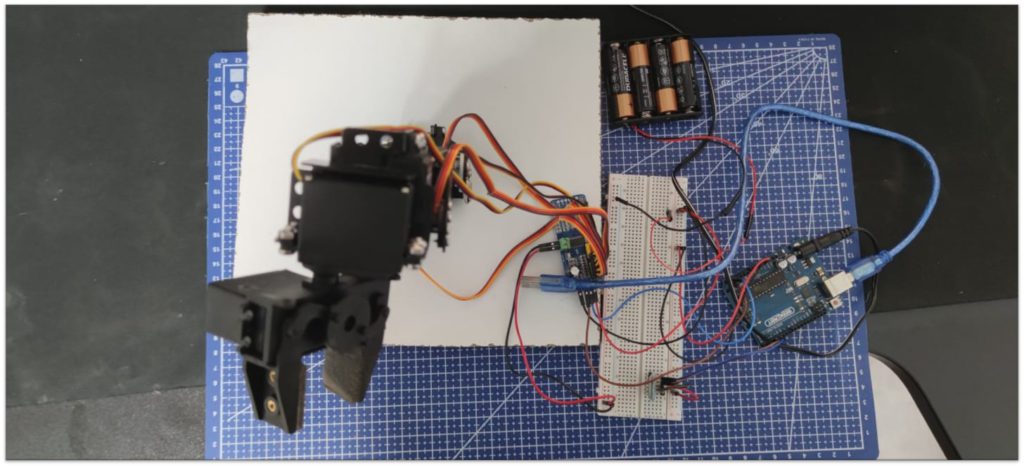
תרשים 4: יישום בפועל של השרטוט.
מערך החומרה 🔨
רכיב
תיאור
Arduino Uno
מיקרו-בקר ראשי לשליטה ולוגיקה של ה- Servos
PCA9685
בקר מנועים מדויק מבוסס I²C PWM עם 16 ערוצים
6 Servos Total
5 Servos סטנדרטיים + 1 Servo עם סיבוב רציף
מודול Bluetooth HC-05
גשר תקשורת אלחוטית עם האפליקציה הסלולרית
Breadboard + Jumpers
בסיס לפיתוח וחיבורי רכיבים
6V 2A External Power
ספק כוח ייעודי לייצוב עומס ה Servos
המנוע השישי: Servo 360° ➕
באמצע הדרך הוספתי Servo שישי שהוא Hitec HSR-1425CR, a Servo בעל סיבוב רציףבניגוד לשאר, הוא לא נשלט לפי זוויות - אלא לפי טווח אות PWM, ששולט במהירות ובכיוון הסיבוב..
📲 Mobile Application
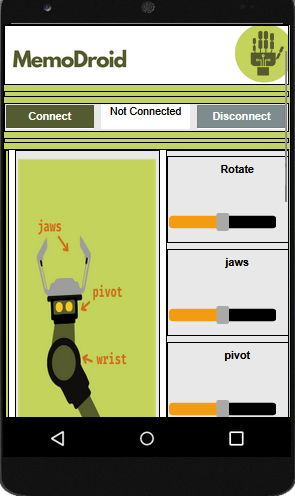
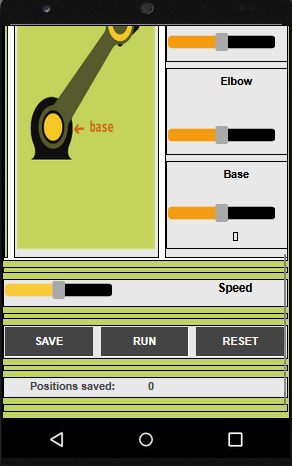
תרשים 5: צילום מסך מס' 1 מהאפליקצייה לנייד
תרשים 6: צילום מסך מס' 2 מהאפליקצייה לנייד
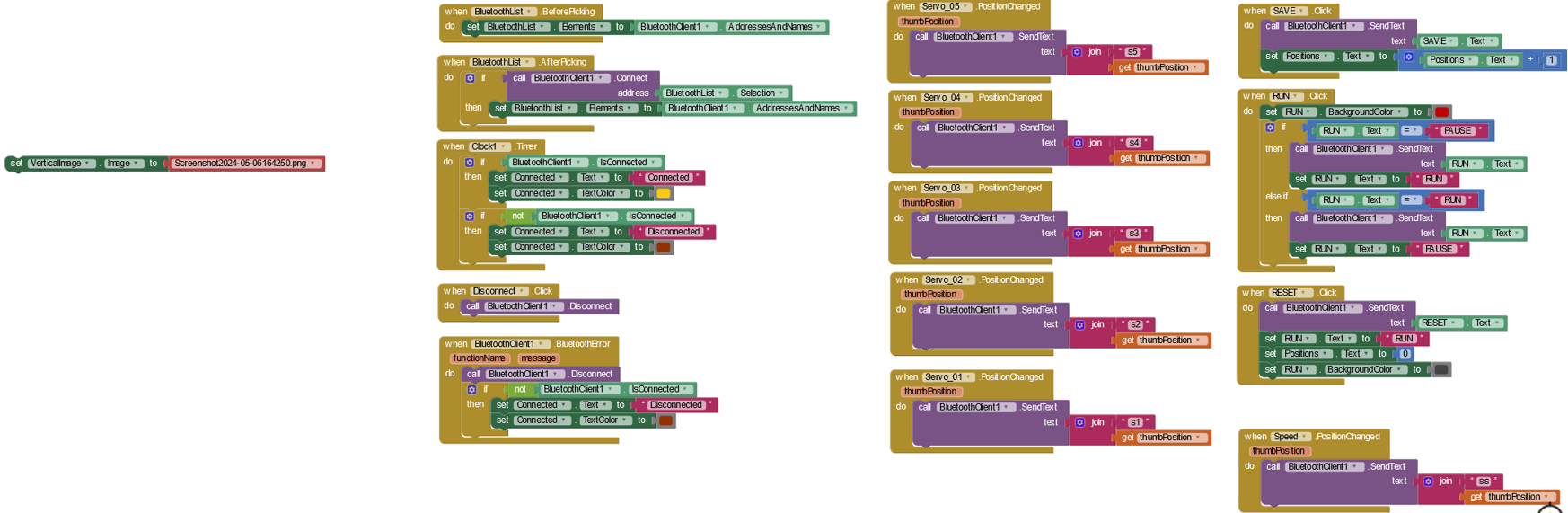
תרשים 7: הלוגיקה המרכזית של האפליקציה לנייד
פונקציות שבוצעו בזרוע ובאפליקציה 🛠️
שליטה ידנית בכל Servo🎮 שליטה בזמן אמת דרך Bluetooth באמצעות הפקודות s1 עד s6. תמיכה גם ב-Servos סטנדרטיים של °180 וגם ב-Servo עם סיבוב רציף(Servo 6).
שמירה והפעלה מחדש של רצפי תנועה 💾
SAVE: שומר את המיקום הנוכחי של כל ה-Servos
RUN: מפעיל את הרצף השמור לביצוע פעולות אוטומטיות
בקרת מהירות מותאמת שנבנתה מאפס ⏱️ בקרת מהירות לא קיימת באופן דיפולטיבי בתנועת ה- Servo יצרתי מנגון מהירות משלי על ידי הזרקת השהיות בין עידכוני המיקומים של ה- Servo. ההשהיה יכולה להיות מותאמת באופן דינמי על ידי ה- ss<value> וכך הפקודה מדמה מהירויות שונות.
ניתוח פקודות Bluetooth בצורה אמינה 🛠️ פיתחתי מנגנון קלט ו-parser יציבים שמסוגלים להתמודד עם שידורי Bluetooth מקוטעים,כך שגם אם פקודה מגיעה בכמה חלקים - היא עדיין מפוענחת ומבוצעת בצורה מדויקת. פקודות נתמכות כוללות:
RUN - התחלת ביצוע הרצף השמור
SAVE - שמירת המיקומים הנוכחיים
PAUSE - עצירה זמנית של הביצוע
RESET - ניקוי רצפים שמורים
התקשורת מתבצעת באמצעות פרוטוקול סדרתי מותאם אישית:
s1<angle>
s2<angle>
...
s6<mode> (1-5)
כל הודעה נשלחת אל ה-Arduino ומתפרשת על ידי ה-parser המרכזי.
⚙️קושחה ולוגיקת בקרה
🌟טיפול בפקודות
כל פקודות ה-Servo מעובדות באמצעות הפונקציה handleCommand()שקוראת בצורה חכמה פקודות כמו s2130 ומזיזה את ה-Servo הרלוונטי למיקומו החדש.
For Servo 6:
s6<1–5> → mapped to:
1 = full reverse (0)
2 = slow reverse (45)
3 = stop (90)
4 = slow forward (135)
5 = full forward (180)
🧐מנגנון ניתוח Bluetooth עם Buffer
אחד הבאגים הכי קשים שנתקלתי בהם בפרויקט היה תוצאה של פיצול הודעות Bluetooth. הנתונים לא הגיעו כמסגרת אחת, אלא התפזרו לכמה חלקים קטנים כמו...
s3
1
80
זה גרם לשגיאות ולפקודות פגומות. כדי לפתור את זה:
בניתי string buffer מותאם אישית
חילצתי פקודות מלאות באמצעות indexOf('s')
דחיתי את העיבוד עד שזוהתה פקודה שלמה
עכשיו הרובוט קורא הודעות Bluetooth מקוטעות בצורה מושלמת בכל פעם..
תרשים 8: יצירת מנגנון Serialization מותאם אישית לתקשורת
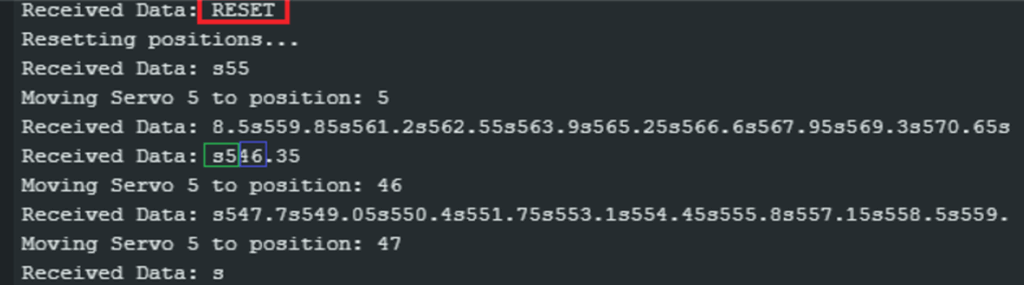
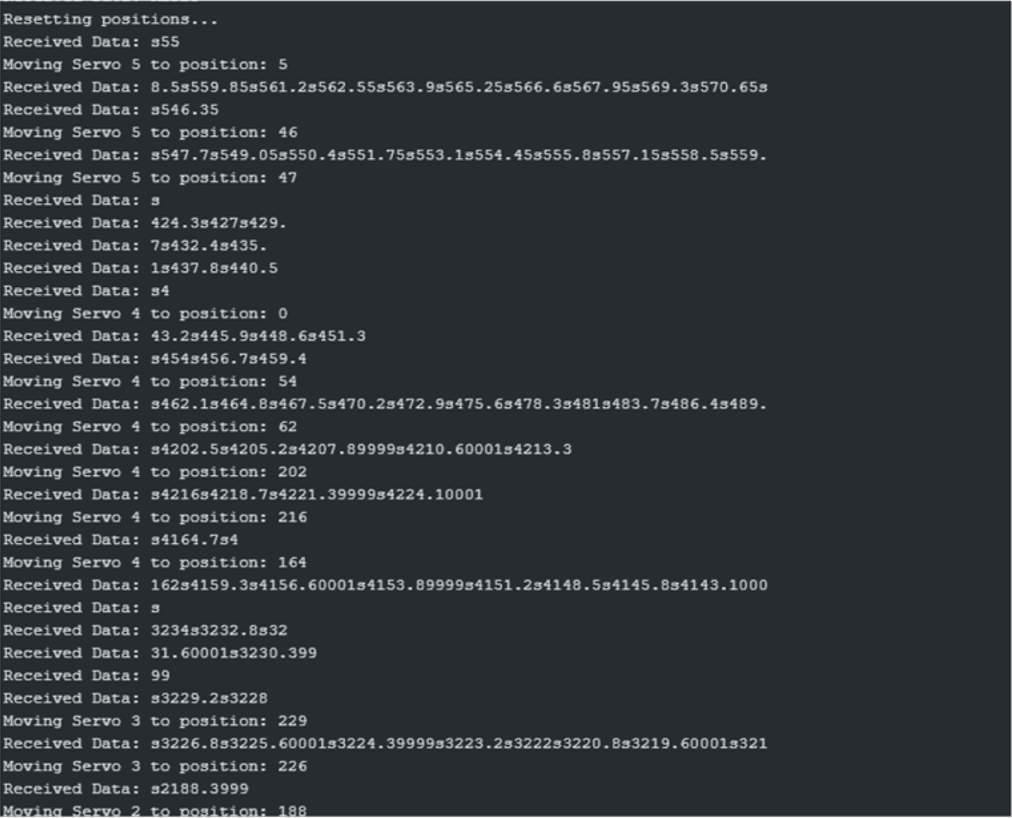
תרשים 9: פלט ה-Serial Monitor המציג את הפקודות
🧪כיול ובדיקות
הטמעתי רוטינת TestCalibration() והשקעתי שעות בכיוון ובתצפית על כל Servo כדי להגיע לטווחים המדויקים:
Servo 1: 0-45°
Servo 2: 100-130°
Servo 3: 150-270°
Servo 4: 0-270°
Servo 5: 45-180°
Servo 6: 1-5 (מותאם להתנהגות סיבוב רציף)
הכיוונון הזה הבטיח ש-MemoDroid יתנהג כמו מערכת רובוטית אמיתית - לא צעצוע.
⚠️מכשולים שהתמודדתי איתם
🛡️מכשול
🛠️ פתרון
רעידות ב-Servos בגלל אספקת מתח לא מספיקה
עברתי לספק כוח חיצוני 6V 2A
אין רכיבי PCA9685 או HC-05 בסימולטור
תכננתי ידנית את כל הסכימה האלקטרונית
הודעות Bluetooth נשברו באמצע השידור
בניתי parser מותאם עם Buffer
טווחי כיול מורכבים
פיתחתי פונקציות בדיקה + כיוונון ידני
Debugging בעת כשלים "שקטים"
הוספתי לוגים בזמן אמת דרך Serial Monitor
יכולות ותוצאות שהושגו ✅
בניתי זרוע רובוטית מתפקדת מאפס
הוספתי תמיכה ב-Servo עם סיבוב של 360°
בניתי בקר נייד (אפליקציה) מאפס
יישמתי הקלטה והפעלה מחדש של תנועות
יצרתי פרוטוקול תקשורת יציב ומותאם אישית
הפכתי את כל המערכת לאינטואיטיבית ומודולרית
💻תמונת מצב של הארכיטקטורה הטכנית
[Mobile App] → Bluetooth → HC-05 → Arduino Uno
↓
Command Parser & Logic Handler
↓
PWM via PCA9685 → Servo Motors (1–6)